En este post continuamos con una de las etapas más extensas de la exploración sismológica, el procesado de datos sísmicos, si no han leído las entradas anteriores pueden hacerlo dándole clic a los siguientes links:
 |
| La finalidad del procesamiento sísmico es llevar los datos tomados en campo a un estado interpretable mediante procesos y algoritmos matemáticos que mejoren la señal, eliminen ruido y estandaricen los datos. |
Como se mencionó anteriormente, se puede definir el procesamiento de datos sísmicos como la alteración de los datos para suprimir el ruido, mejorar la señal y migrar los eventos sísmicos a su apropiada ubicación en el espacio. Los pasos del procesamiento incluyen normalmente un análisis de velocidades y frecuencias, correcciones estáticas, deconvolución, normal moveout, dip moveout, apilamiento, y migración, la cual puede ser realizada antes o después del apilamiento. El procesamiento sísmico facilita una mejor interpretación porque las estructuras del subsuelo y las geometrías de las reflexiones se vuelven más aparentes.
 |
| Flujo del procesamiento de datos sísmicos |
Multiplexado y demultiplexado.
Las señales de todos los receptores arriban a la grabadora al mismo tiempo. Sin embargo, la grabadora es solo capaz de medir un receptor al mismo tiempo, así que se utiliza la técnica del multiplexado.
 |
| El multiplexado separa todas las muestras para producir una secuencia de tiempo para cada geófono |
Multiplexor.- Interruptor rotatorio. Rota cada unos cuantos mili segundos para muestrear cada traza.
Ciclo multiplexado.- Un cambio en el interruptor.
Intervalo de muestreo.- Tiempo que toma completar un ciclo de multiplexado, generalmente son de 2 a 4 milisegundos. Para recolectar todas estas muestras a su lugar original, se usa el demultiplexado.
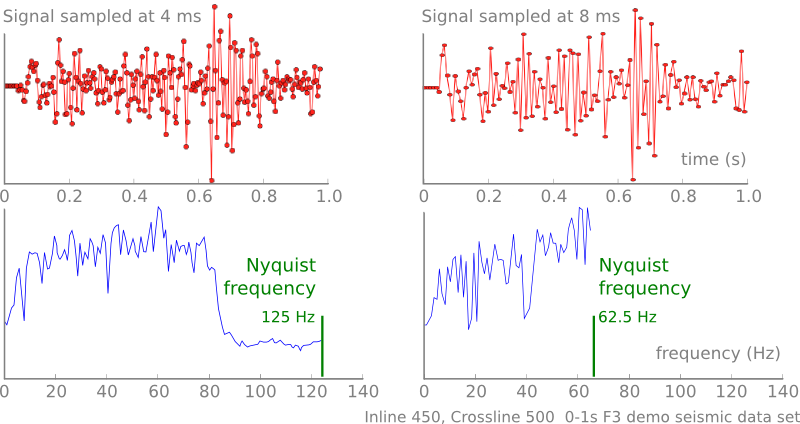 |
| Diferencias entre dos intervalos de muestreo a 4 ms y 8 ms |
Recuperación de ganancias.
Es un paso en el procesado sísmico que se realiza para compensar por la atenuación de la amplitud del dato. Al dispararse los tiros, las ondas se esparcen como un cono en 3-D. Este esparcimiento de energía se le conoce como divergencia esférica y causa que la energía disminuya con el incremento de la profundidad. Las altas frecuencias son absorbidas más rápidamente que las bajas frecuencias por las rocas. Así, la energía sísmica reflejada de un evento geológico profundo será recibido en los geófonos como una señal débil, y los eventos cercanos a la superficie serán recibidos como una señal fuerte. Se usa la recuperación de ganancia para mejorar las señales débiles.
Amplitud verdadera.- Es la amplitud real en una traza sísmica sin ninguna ganancia aplicada.
Escalamiento de trazas.- Se le conoce también como normalización. Es usado porque después de que todas las trazas han sido apiladas, las amplitudes más fuertes tendrán mayor peso que las débiles, así que se corre este proceso para aumentar proporcionalmente las trazas débiles y disminuir las fuertes.
Control y balance automático de ganancia.- Es usado para mejorar señales débiles (difiere del escalamiento de trazas en que están basados en una ventana de análisis de tiempo menor mientras que el escalamiento de trazas aplica ganancia a una ventana grande)
 |
| Las imágenes muestran los gathers antes de la aplicación del control automático de ganancia y después de su aplicación. |
Edición.- En este paso se remueven las malas trazas, canales ruidosos o canales abiertos.
Mute.- Hace ceros los arribos que no son reflexiones primarias de onda P.
 |
| Edición y mute |
Deconvolución.- Parte del procesado de señales sísmicas en el que se recuperan altas frecuencias, se atenúan múltiples, se ecualizan amplitudes, producir una ondícula de fase cero o para otros propósitos que afectan generalmente la forma de la ondícula. Un común ejemplo es que en el caso ideal, el geófono está estacionario hasta que llega el primer arribo de una reflexión, realiza un movimiento y regresa de nuevo a su posición estacionaria, por lo que las reflexiones ideales de un sismograma muestran una serie de picos. En el caso real, los sismogramas para estas capas se presentan en ondículas cortas, debido a que los picos pasan por las capas de la Tierra las cuales actúan como filtro y se graba el resultado de la convolución de su reflectividad, la ondícula fuente, múltiples, etc. y lo transforman en una ondícula corta. El proceso usado para regresar las ondículas cortas a picos se conoce como deconvolución.
Tipos de deconvolución
1. Antes y después del apilamiento (DBS y DAS por sus siglas en inglés):
- DBS es la deconvolución antes del apilamiento (deconvolution before stack) y es un proceso estándar aplicado a todos los datos. Remueve cualquier múltiple corto y reverberaciones.
- DAS es la deconvolución después del apilamiento (deconvolution after stack) y se usa mayormente en datos marinos. Remueve múltiples de periodo largo.
2. Deconvolución impulsiva o en picos:
- Deconvolución impulsiva o en picos es usada para las fuentes como la pistola de aire y la dinamita, se usa antes del apilamiento.
- Deconvolución predictiva es usada para las fuentes de caída de peso, las cuales no generan muchas altas frecuencias.
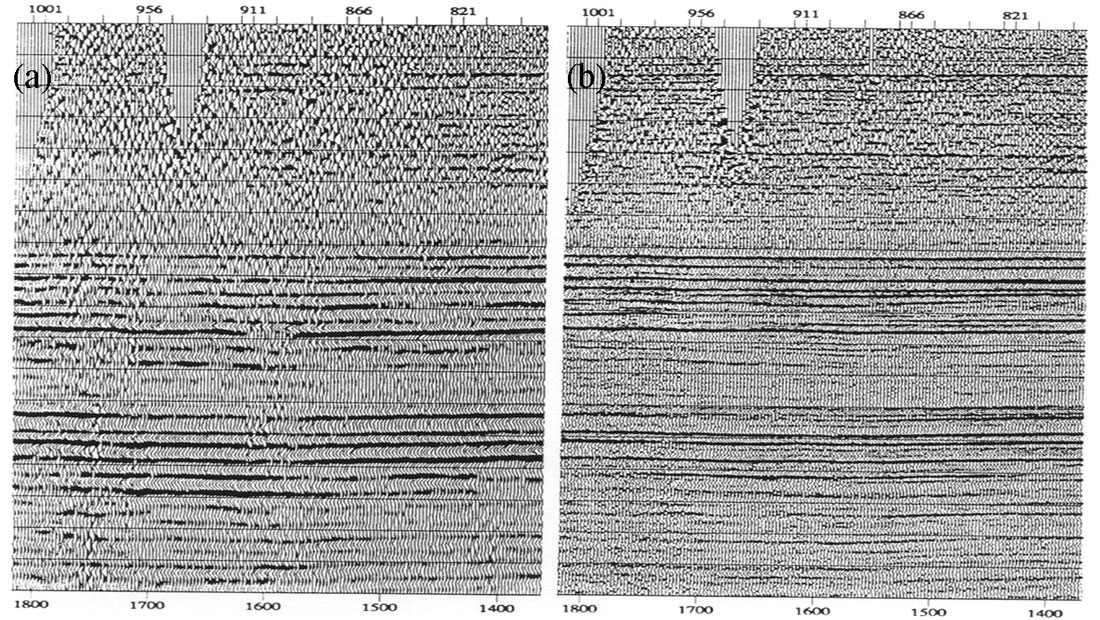 |
| Sección sísmica a) antes de la deconvolución y b) después de la deconvolución |
Filtrado
El filtrado es un proceso o un algoritmo que usa un set de límites para eliminar porciones no deseadas de los datos sísmicos, comúnmente en el ámbito de la frecuencia o la amplitud, para mejorar la relación señal-ruido de los datos o para lograr la deconvolución. El uso común de filtros digitales en el procesado de datos es para filtrar frecuencias no deseadas.
Tipos de filtros:
- Filtro pasabanda.- Este filtro no altera la fase, sólo extrae una banda definida de frecuencias, cualquier frecuencia alta o baja fuera de su rango será atenuada.
- Filtro de corte bajo o pasa altas.- En este caso, el analista sólo desea eliminar frecuencias bajas. Este filtro es usado para eliminar las bajas frecuencias del ground roll.
- Filtro de corte alto o pasa bajas.- Para este caso el analista desea eliminar únicamente las frecuencias altas.
- Filtro notch o filtro suprime banda.- Es usado para filtrar una banda pequeña de frecuencias dentro de un rango de frecuencia de los datos. El uso más común de este filtro es para atenuar ruidos causados por líneas eléctricas.
-Filtro variable de espectro de amplitud.- En este caso, el analista no quiere mantener la amplitud del filtro constante. Este tipo de filtro se usa para procesamientos especiales.
-Filtro de fase.- En algunos casos, en lugar de filtrar las frecuencias, puede ser necesario ajustar la fase de los datos. Por ejemplo, un survey en área costera, ya que se toma en ambos ambientes terrestre y marino. En la tierra la cuadrilla usara geófonos, y en la laguna usarán hidrófonos. Cuando geófonos e hidrófonos son usados al mismo tiempo, las trazas grabadas con los geófonos estarán fuera de fase con aquellas grabadas con hidrófonos. Por lo que es necesario hacer un cambio de fase en las trazas de los hidrófonos antes de apilarlas. Se aplica el filtro de fase para cambiar la fase de todas las frecuencias sin alterar la amplitud.
- Filtro inverso.- Es cualquier tipo de filtro que regrese los efectos de un filtro que ya haya sido aplicado a los datos.
 |
| Tipos de filtro |
MUY BUENA PUBLICACION.
ResponderBorrar